地址:深圳市罗湖区文锦广场文盛中心1401
邮箱:wawa209@126.com
1.编码器的定义
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。
通常来说,编码器可以将角度位移、直线位移等物理量转换为电信号,是一种传感器。
这里的电信号根据不同工作原理的编码器输出脉冲、二进制数码等不同的类型,下面会提到。
2.编码器的分类
编码器的分类按不同的分类标准可以做如下划分:
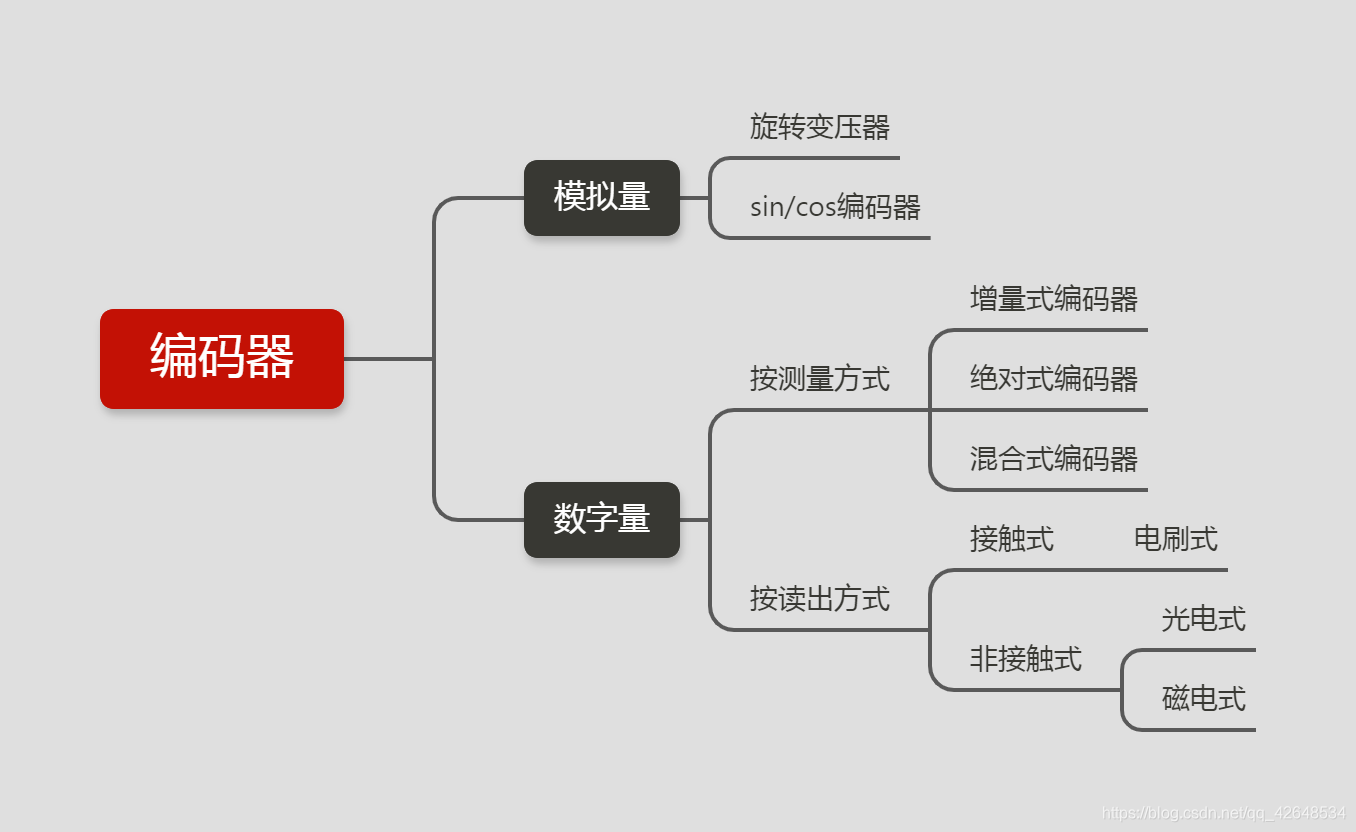
需要补充的一点的是,绝对编码器又可分为单圈编码器和多圈编码器。
3.绝对式编码器
3.1工作原理
绝对式编码器是把被测转角通过读取码盘上的图案信息直接转换成相应代码的检测元件。码盘有光电式、接触式和电磁式三种。
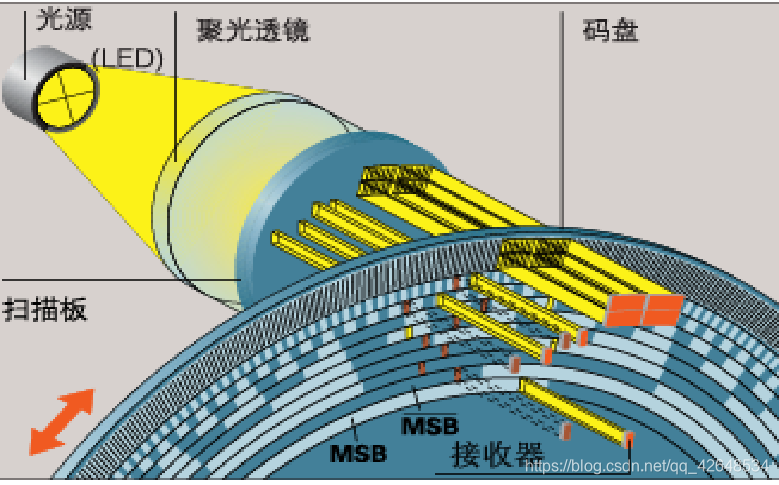
光电式码盘是目前应用较多的一种,由安装在旋转轴上的编码圆盘(码盘)、窄缝以及安装在圆盘两边的光源和光敏元件等组成。下图所示为一种光电式编码器的码盘,码盘由光学玻璃制成,其上刻有许多同心码道, 每位码道上都有按一定规律排列的透光和不透光部分,即亮区和暗区。当光源将光投射在码盘上时,转动码盘,通过亮区的光线经窄缝后, 由光敏元件接收。光敏元件的排列与码道一一对应, 对应于亮区和暗区的光敏元件输出的信号,前者为“1”,后者为“0”。 当码盘旋至不同位置时,光敏元件输出信号的组合,反映出按一定规律编码的数字量,代表了码盘轴的角位移大小。
绝对式旋转编码器的原理图
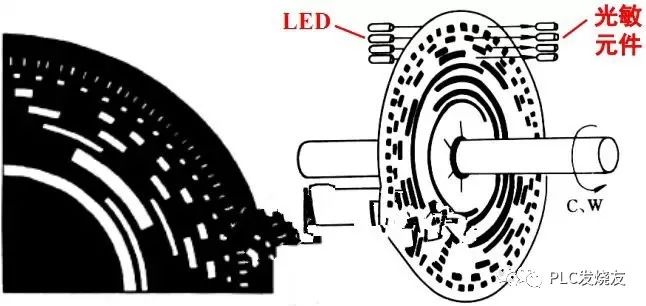
绝对式旋转编码器的原理图
绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16 线……编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
工作时,码盘的一侧放置电源,另一边放置光电接受装置,每个码道都对应有一个光电管及放大、整形电路。码盘转到不同位置,光电元件接受光信号,并转成相应的电信号,经放大整形后,成为相应数码电信号。
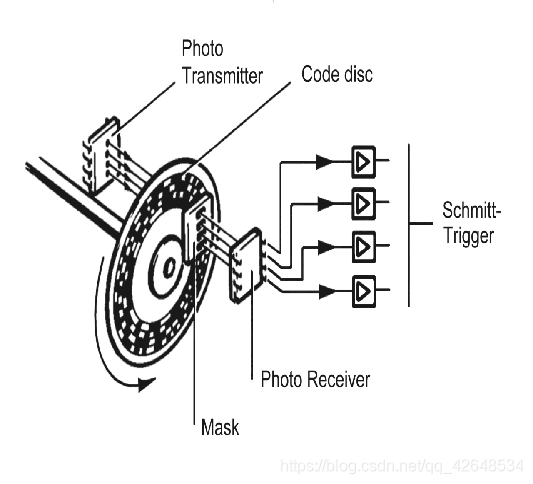
绝对值编码器原理图
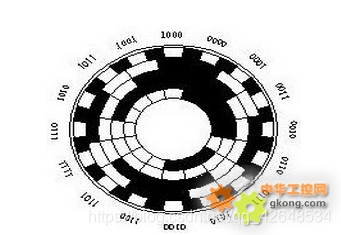
由于制造和安装精度的影响,当码盘回转在两码段交替过程中,会产生读数误差。例如,当四位二进制码盘顺时针方向旋转,由位置“0111”变为“1000”时,这四位数要同时都变化,可能将数码误读成16种代码中的任意一种,如读成1111、1011、1101、…0001等,产生了无法估计的很大的数值误差,这种误差称非单值性误差。为了消除非单值性误差,码盘编码通常采用格雷码编码。
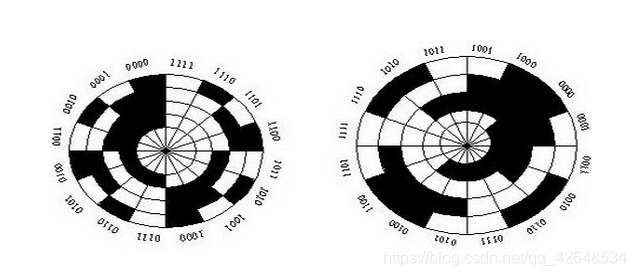
四位二进制码盘和格雷码码盘
在二进制格雷码码盘的最外圈再增加一圈信号位,这就是就是带判位光电装置的二进制循环码盘。该码盘最外圈上的信号位的位置正好与状态交线错开,只有当信号位处的光电元件有信号时才读数,这样就不会产生非单值性误差。
带判位光电装置的四位二进制格雷码码盘

3.2多圈绝对值编码器
旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称为单圈绝对值编码器。如果要测量旋转超过360度范围,就要用到多圈绝对值编码器
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点, 将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。
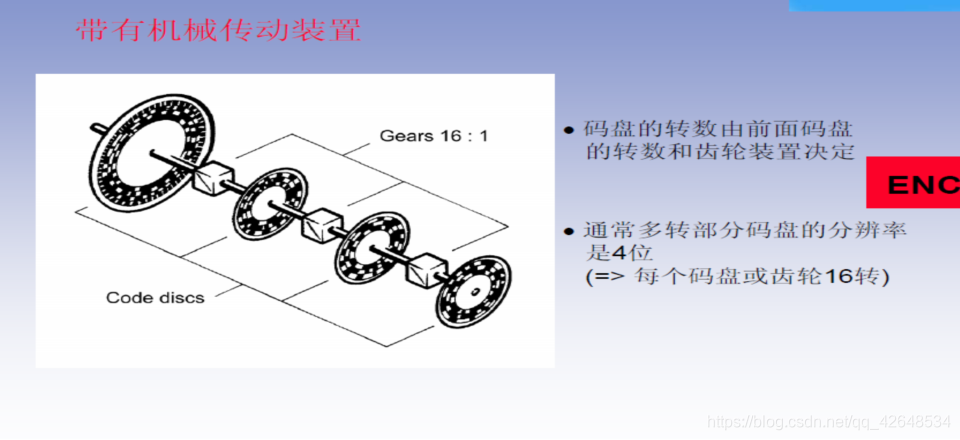
多圈绝对值编码器
3.3绝对式编码器的特点
1.在一个检测周期内对不同的角度有不同的格雷码编码,因此编码器输出的位置数据是唯一的。
2.因使用机械连接的方式,在掉电时编码器的位置不会改变,上电后立即可以取得当前位置数据。
3.检测到的数据为格雷码,因此不存在模拟量信号的检测误差
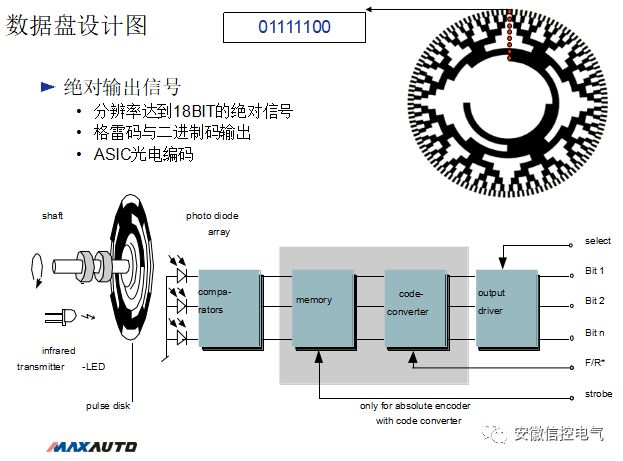
3.4绝对式编码器的输出
绝对编码器输出信号类型为二进制数字信号。
绝对值编码器信号输出有并行输出、串行输出、总线型输出等,单圈低位数的编码器一般用并行信号输出,而高位数的和多圈的编码器输出信号不用并行信号(并行信号连接线多,易错码易损坏),一般为串行或总线型输出。其中串行最常用的是时钟同步串联信号(SSI);总线型最常用的是PROFIBUS-DP型,其他的还有DeviceNet, CAN, CC-link等。
海德汉角度编码器采用了EnDat串行双向数字接口、Fanuc和Mitsubishi串口进行通信。
4.编码器与计算机的通信
编码器输出信号类型,由编码器的工作原理决定。一般来讲,增量式编码器输出的增量信号为电压信号,有光敏元件直接输出的正弦电压信号,而大多数采用TTL接口等输出方波电信号。而绝对式编码器输出的位置信息为编码数字电信号,按位(bit)传输。因此大多数编码器需要处理的输出信号类型为数字信号。
4.1绝对值信号
位置信号按位进行传输,同时也常传输时钟信号以便后续处理。一般采用串行接口与计算机通信。这里介绍常用的SSI接口、EnDat接口、BISS接口与计算机的通信。
4.2SSI通信
SSI(串行同步接口)是连接绝对位置传感器和控制器的广泛应用的串行接口。SSI利用控制器发出一个时钟脉冲序列,初始化传感器的门限输出。
传感器不断更新位置数据,并传送到移位寄存器中。在每一个时钟脉冲序列之间,最少有25毫秒的保持时间,用于将新的数据写入移位寄存器。当传感器从控制器接收到一个脉冲序列时,数据被移出。当最低有效位 (LSB) 变为HIGH,并且超出最小保持时间时,就可以读取新的数据。请参考下图,了解典型SSI框图,SSI时序图以及含有25毫秒的保持时间的顺序测量SSI时序图。
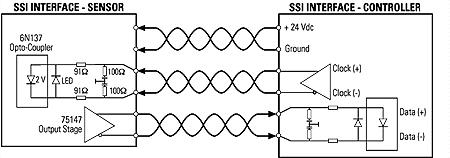
SSI框图
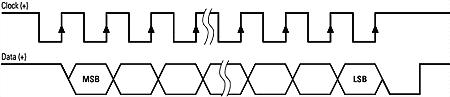
SSI时序图

用于顺序测量的SSI时序
EnDat接口是HEIDENHAIN专为编码器设计的数字式、全双工同步串行的数据传输协议,它不仅能为增量式和 式编码器传输位置值,同时也够传输或更新存储在编码器中的信息,或保存新的信息。由于使用了串行传输方式,所以只需四条信号线,在后续电了设备的时钟激励下,数据信息被同步传输。数据类型(位置值、参数、诊断信息等)由后续电子设备发送给编码器的模式指令选择决定。
特点:
1. 传输位置值与附加信息可同时传输;附加信息的类型可通过存储地址选择码选择。
2. 编码器数据存储区域包括编码器制造商参数、OEM厂商参数、运行参数、运行状态,便于系统实现参数配置。
3. EnDat2.2编码器实现了全数字传输,增量信号的处理在编码器内部完成(内置14Bit细分),提高了信号传输的质量和可靠性,可实现更高的分辨率。
4. 监控和诊断功能,报警条件包括:光源失效、信号幅值不足、位置计算错误、运行电压太低或太高、电流消耗太大等;当编码器的一些极限值被接近或超过时提供警告信号。
5. 更宽的电压范围(3.6-14V)和传输速率(16M)。
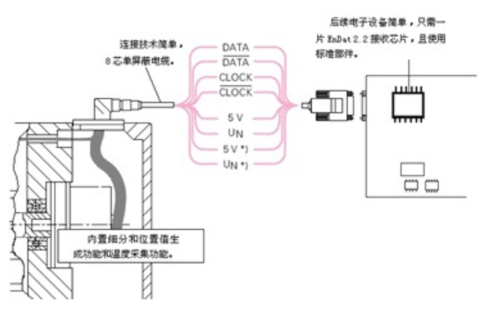
EnDat接口编码器数据采集原理图

数据传输格式
在每一帧同步数据传输时一个数据包被发送,传输循环从时钟的 个下降沿开始测量值被保存,计算位置值。在两个时钟脉冲(2T)后,后续电子设备发送模式指令“编码器传输位置值”(带或不带附加信息)。
在计算出了 位置值后,从起始位开始编码器向后续电子设备传输数据,后续的错误位F1和F2(只存在于EnDat2.2指令中)是为所有的监控功能和故障监控服务的群组信号,他们的生成相互独立,用来表示可能导致不正确位置信息的编码器故障导致故障的确切原因保存在“运行状态”存储区,可以被后续电了设备查询。
从 位开始, 位置值被传输,数据的长度由使用的编码器类型决定。传输位置值所需的时钟脉冲数保存在编码器制造商的参数中。位置值数据的传输以循环冗余检测码结束。
产品
应用
服务
资讯
公司

 首页
首页 产品
产品 资讯
资讯 电话
电话