
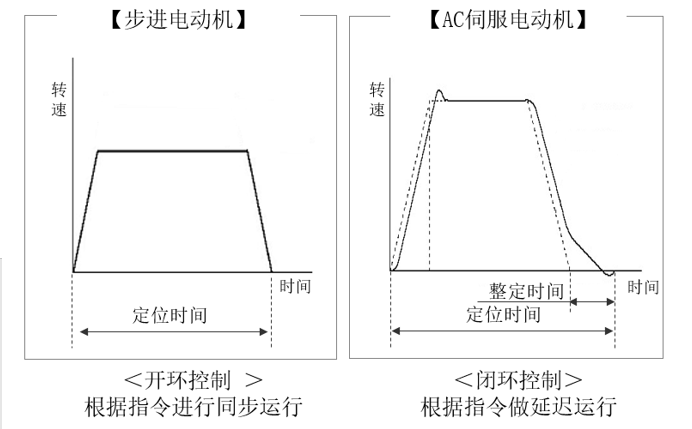
伺服电动机则需要计算编码器的反馈和脉冲指令的差值,并按照这一差值控制电动机旋转,这个过程需要一定的时间。脉冲输入的位置指令和实际的电动机旋转发生延迟,电动机停止时这一时间差就是整定时间。
功率
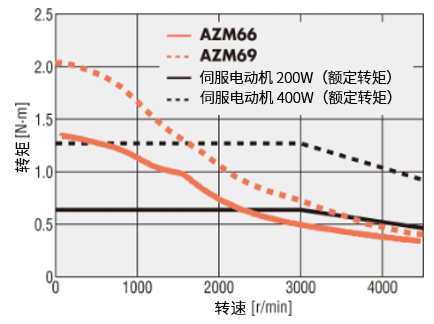
伺服电机通常标注输出功率(如200W等),但步进电动机没有功率的说法。以下是关于二者区别的说明。
关于步进电机和伺服电机的输出
额定功率是电动机在额定电压、额定频率下发挥最佳性能并连续输出的功率。额定功率下的转速、转矩被称为额定转速、额定转矩。功率(W数)的计算公式如下。
<公式> 功率[W] =常数×T×N
常数:0.1047
T : 转矩[N・m]
N : 转速[r/min]
额定功率通常需要通过额定转速计算,但步进电动机没有额定转速的概念,因此无法标注功率(W数)。
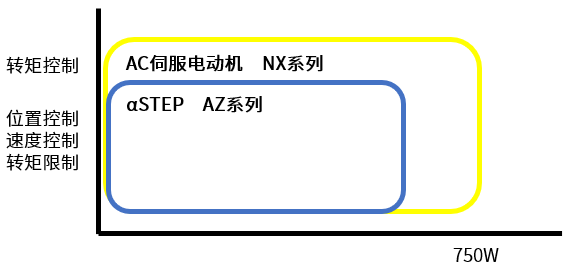
步进电机和伺服电机的适用范围
步进电机和AC伺服电机都受到半导体、电子零部件制造设备、医疗器械等广泛用途的采用。
步进电机大输出的产品较少,通常需要750W以上非常大型的机构较多使用伺服电机驱动。
步进电机和伺服电动机都可以实现转矩限制,但需要非常精密的转矩控制时,伺服电机更加适合。
机构应用
增益调整
高刚性与低刚性机构的应用
步进电机系列依靠电机构造,而伺服电机依靠编码器反馈信号实现定位。
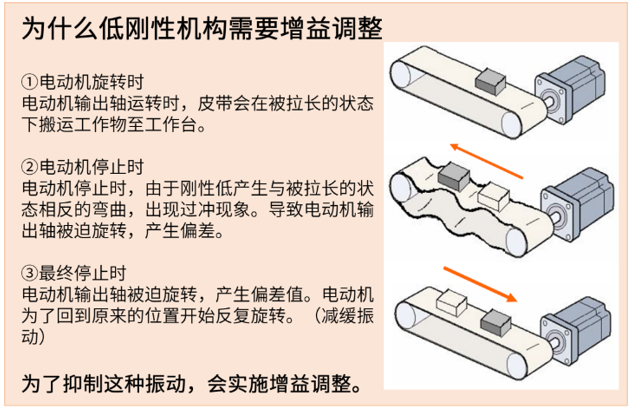
步进电动机是开环控制的同步电机,所以对机构的刚性没有要求,在驱动如皮带这样的低刚性机构时无需驱动器调整。
无需增益调整的AZ系列
而伺服电动机因为是闭环控制,必须对应负载的状态做增益调整。近年伺服电动机的自动增益功能,可以进行自动的增益调整。
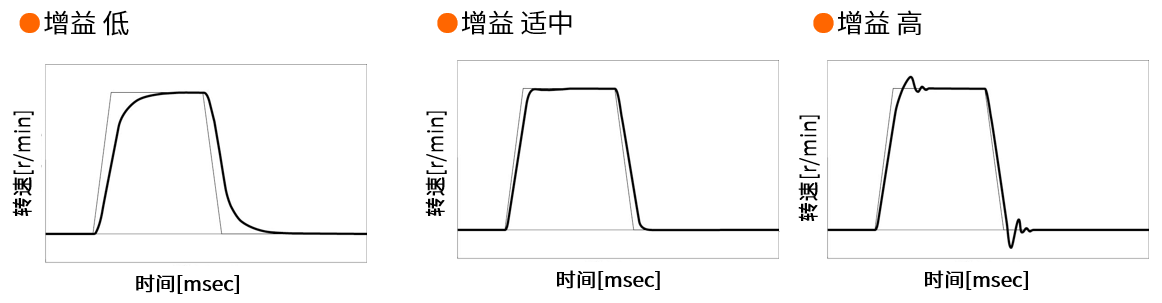
AC伺服电机增益调整
同步性
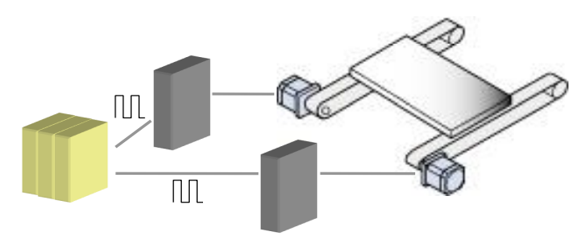
同步运行多台电机
想要同步运行多台的电机时,有特殊性的步进电机更容易使用。
●步进电机的同步运行
因为是开环控制,与输入的脉冲进行同步运行。只要脉冲指令同步输入,就可以进行多台电机几乎相同的运行。
●AC伺服电机时的同步运行
因为是闭环控制,相对脉冲指令发生迟延。控制多台电机时,因迟延时间各不相同,有互相干扰运行不稳定情况的发生。

 首页
首页 产品
产品 资讯
资讯 电话
电话